Version
4.6. 在ROS 2中启用和可视化点云
本节演示如何从相机节点启用点云数据输出并使用RViz2进行可视化。
4.6.1. 启用深度点云
4.6.1.1. 启用深度点云的命令
要激活深度信息的点云数据流,使用以下命令:
ros2 launch orbbec_camera gemini_330_series.launch.py enable_point_cloud:=true
4.6.1.2. 在RViz2中可视化深度点云
运行上述命令后,执行以下步骤可视化深度点云:
打开RViz2。
添加
PointCloud2显示。选择
/camera/depth/points话题进行可视化。将固定帧设置为
camera_link以正确对齐数据。
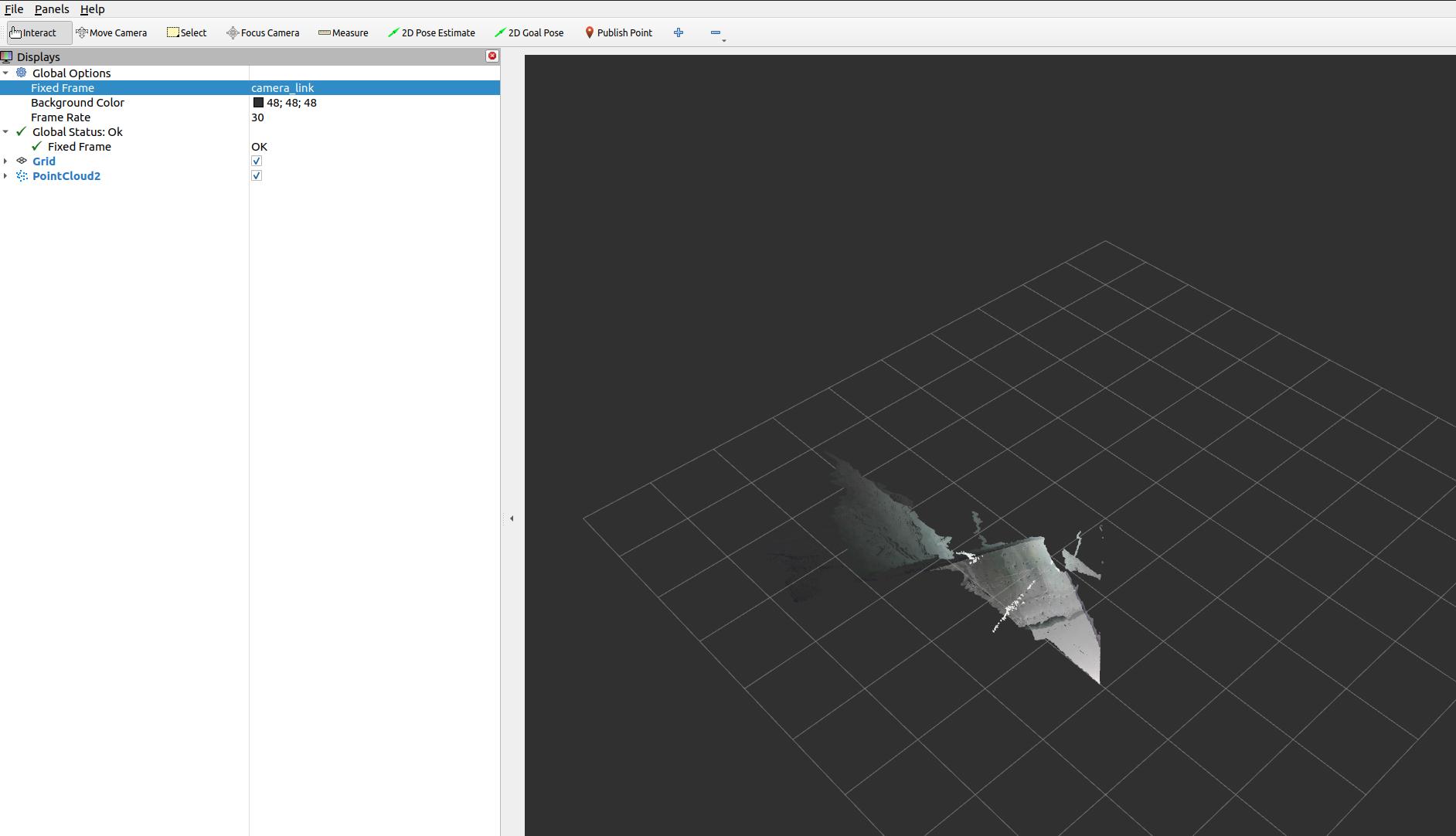
可视化示例
深度点云在RViz2中可能如下所示:
4.6.2. 启用彩色点云
4.6.2.1. 启用彩色点云的命令
要启用彩色点云功能,输入以下命令:
ros2 launch orbbec_camera gemini_330_series.launch.py enable_colored_point_cloud:=true
4.6.2.2. 在RViz2中可视化彩色点云
要可视化彩色点云数据:
执行命令后启动RViz2。
添加
PointCloud2显示面板。从列表中选择
/camera/depth_registered/points话题。确保固定帧设置为
camera_link。
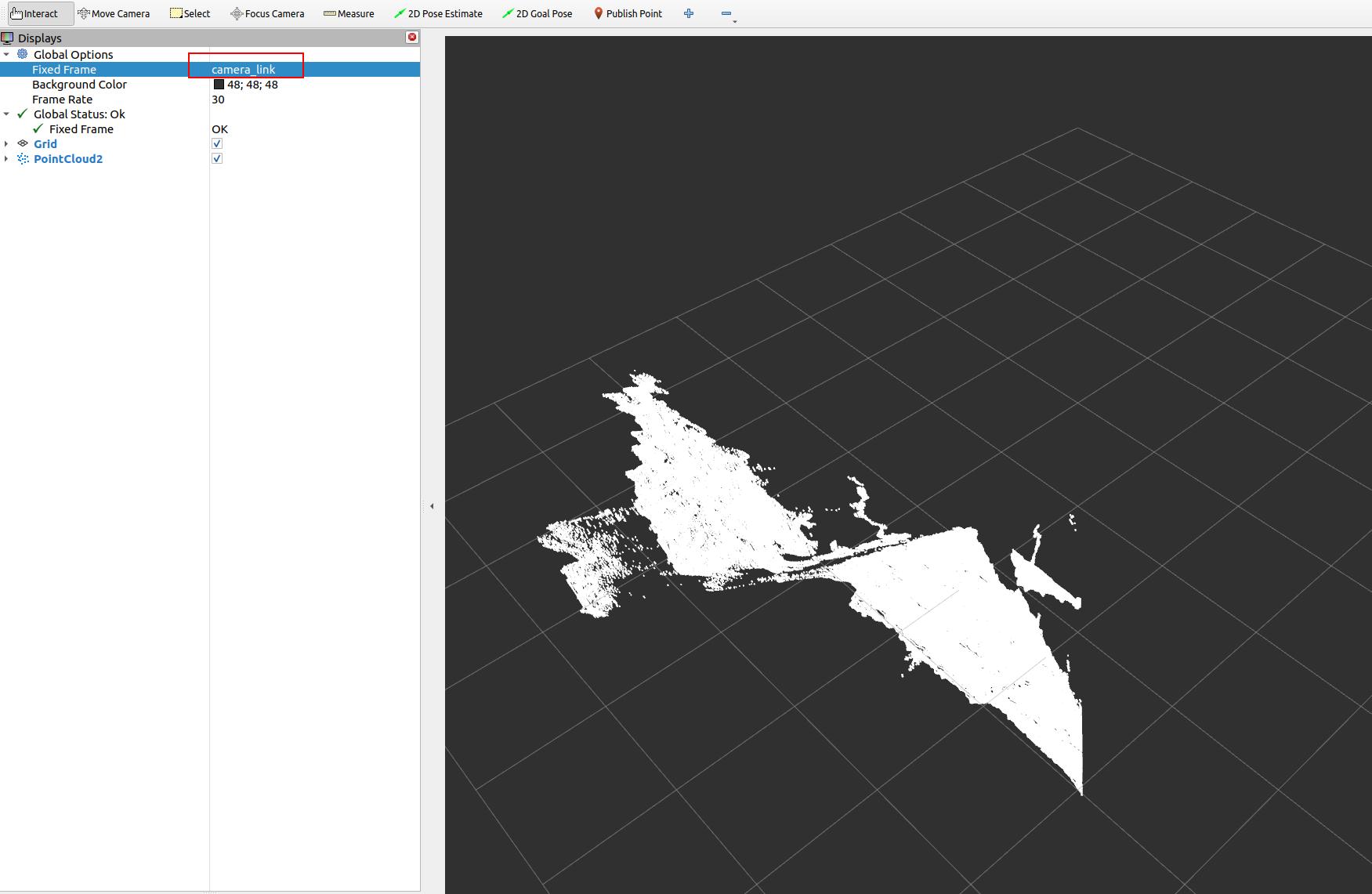
可视化示例
RViz2中彩色点云的结果应该如下所示: