Version
6.1. 简介
本节介绍基准测试工具,说明其目的、功能以及它可以帮助您测量的内容。
6.1.1. 通用基准测试节点
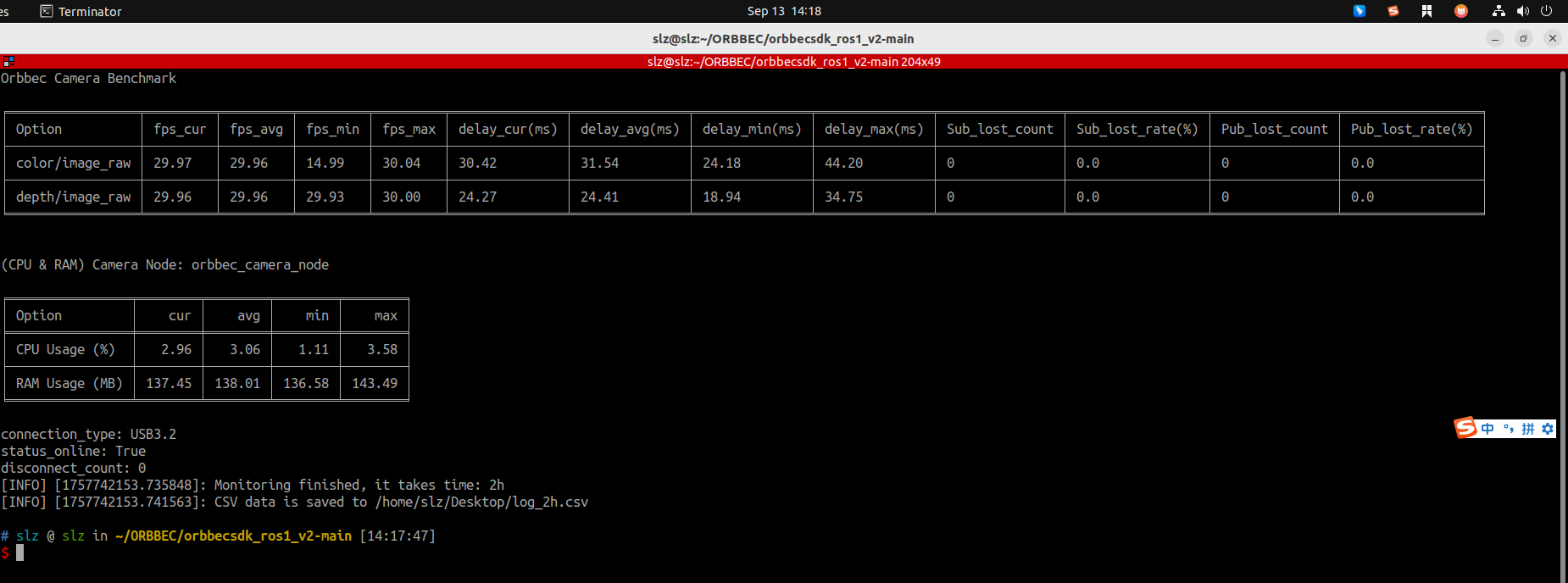
common_benchmark_node.py是一个用于监控在ROS环境中运行的Orbbec相机性能的工具。它实时收集和记录关键的相机指标,如帧率、延迟、系统资源使用情况和丢包率,帮助用户评估相机节点的稳定性和性能(每秒更新一次)。
功能特性
测量发布的图像帧率和延迟(当前、最小、最大、平均值)
监控相机节点的CPU/ARM使用率(当前、最小、最大、平均值)
跟踪丢帧率(发布者)和丢包率(订阅者)
将实时统计信息(1 Hz)打印到终端并保存结果到CSV文件
支持可配置的运行时长和CSV输出路径
示例
在 ROS1 中,由于消息头包含 seq 字段,可以同时统计丢帧率和丢包率。
6.1.2. 服务基准测试节点
service_benchmark_node工具用于监控服务调用的性能。它可以测量服务调用的成功率和执行服务所需的时间。
功能特性
对单个服务调用进行基准测试,测量延迟和成功率
根据YAML配置文件中定义的多个服务进行基准测试
可选择将基准测试结果保存到CSV文件
示例
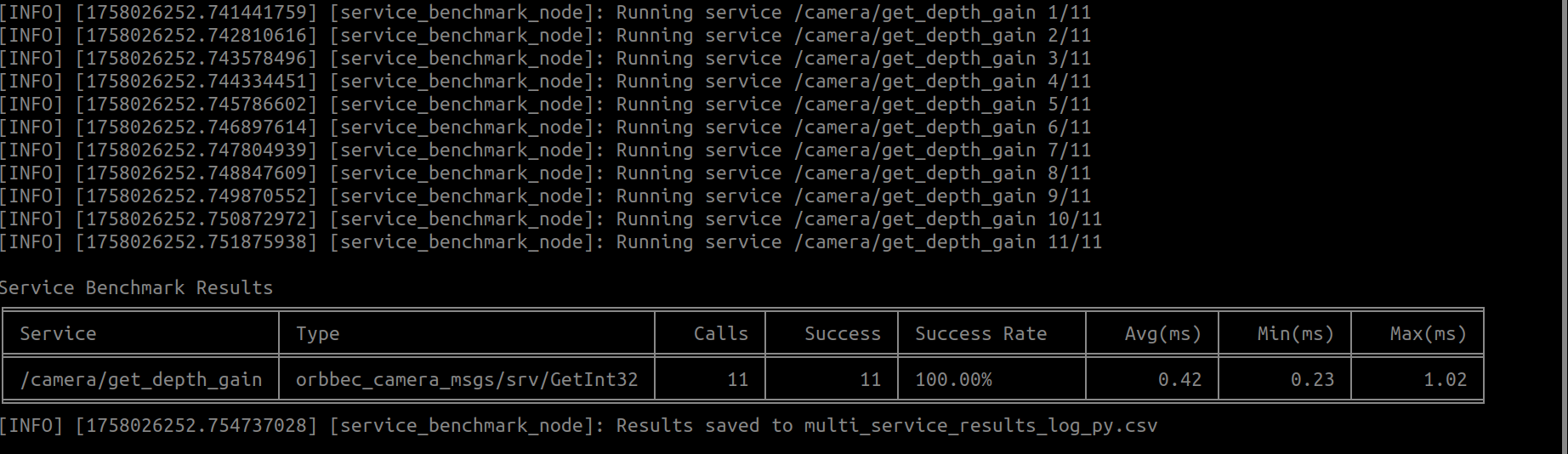
当您需要为多个服务收集数据时,建议使用CSV文件进行分析。