4.3. Multi-Camera Synchronization
4.3.1. Multi-Camera Synchronous Hardware Connection
4.3.2. Multi-Camera Synchronization Software Configuration
First, modify the configuration file (multi_device_sync_config.json), modify the serial number of the Primary Device and Secondary Device, if you need to configure other parameters, please refer to the multi-camera sync document
{
"devices": [
{
"serial_number": "CP3S34D00051",
"config": {
"mode": "PRIMARY",
"depth_delay_us": 0,
"color_delay_us": 0,
"trigger_to_image_delay_us": 0,
"trigger_out_enable": true,
"trigger_out_delay_us": 0,
"frames_per_trigger": 1
}
},
{
"serial_number": "CP3L44P00054",
"config": {
"mode": "SECONDARY",
"depth_delay_us": 0,
"color_delay_us": 0,
"trigger_to_image_delay_us": 0,
"trigger_out_enable": true,
"trigger_out_delay_us": 0,
"frames_per_trigger": 1
}
}
]
}
Multi-device synchronization Sample, please refer to (two_devices_sync.py), if you need to synchronize more than 2 devices, it is recommended to use C++.
#1. read sync param from json config,and set multi device sync params
device.set_multi_device_sync_config(sync_config)
#2. start the data stream for each device
start_streams(pipelines, configs)
#3. Synchronize the device time
ctx.enable_multi_device_sync(60000)
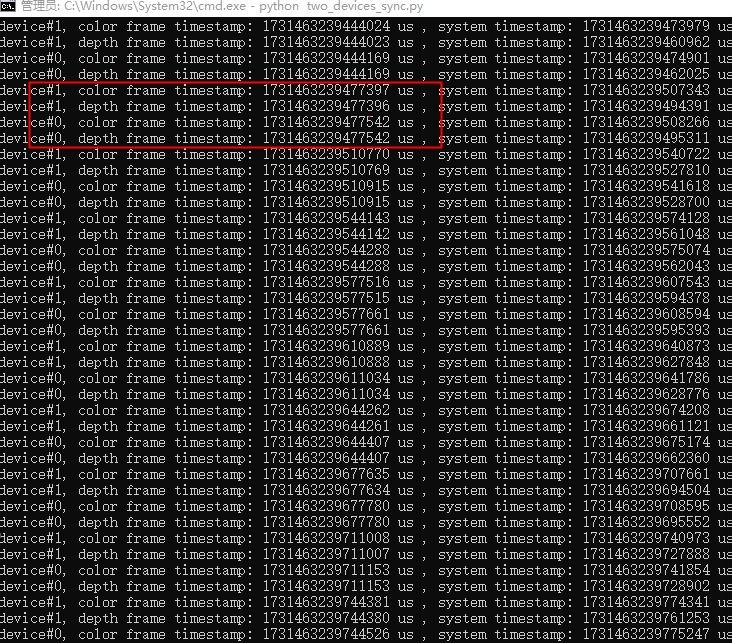
#4. print serial number and timestamp,Determine synchronization effect by timestamps
if color_frame is not None:
print(f"device#{i}, color frame timestamp: {color_frame.get_timestamp_us()} us , system timestamp: {color_frame.get_system_timestamp_us()} us")
if depth_frame is not None:
print(f"device#{i}, depth frame timestamp: {depth_frame.get_timestamp_us()} us , system timestamp: {depth_frame.get_system_timestamp_us()} us")
Running results: We use the timestamps of the Primary and Secondary printed by Sample to determine if they are synchronized on.