1.2. SDK Overview
Orbbec SDK v2.6.3 and later supports LiDAR devices such as the Pulsar ME450 and Pulsar SL450.
1.2.1. Terms
| ID | Name | Explain |
|---|---|---|
| 1 | LiDAR | Light Detection and Ranging - uses laser pulses to measure distance and create 3D point clouds |
| 2 | Firmware | Firmware of LiDAR device |
| 3 | Point Cloud | A set of data points in space representing the 3D shape of scanned environment |
| 4 | Scan Rate | Frequency at which LiDAR completes full scans |
| 5 | Azimuth | Horizontal angle of laser beam direction |
| 6 | Zenith | Zenith angle - the angle between the laser beam and the vertical direction |
| 7 | Reflectivity | The measure of a surface's ability to reflect laser pulses, affecting the intensity of returned signals |
1.2.2. Orbbec SDK v2 Architecture Overview
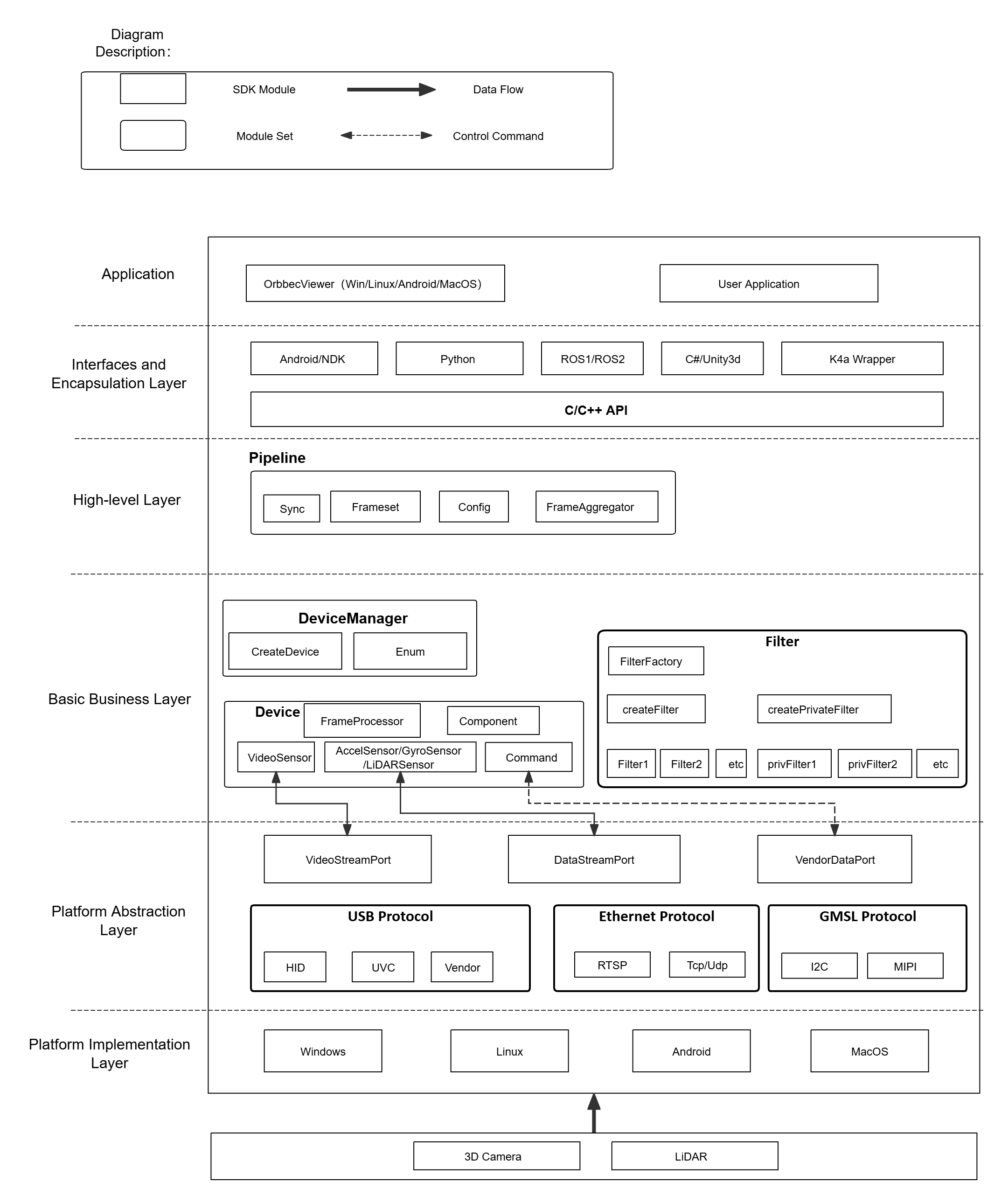
Application
OrbbecViewer, Sample, and User Application Implementation.
Interfaces and Encapsulation Layer
OrbbecSDK Interface Encapsulation and Wrapper Encapsulation.
High-level Layer
HighLevel encapsulates the core business components and provides interfaces to the outside using a pipeline.
Basic business layer
The realization of the core business logic framework.
Platform abstraction layer
Cross-platform components abstract operating system differences and provide a unified access interface.
Platform implementation layer
The driver implementation of each platform.
1.2.3. SDK Concept Overview
Context
Context which provides a set of settings includes settings such as device state change callbacks, log levels, and more. The Context can access multiple devices.
Device
One actual hardware device corresponds to one Device object, which is used to obtain relevant information of the device and control its attributes.
Pipeline
The HighLevel corresponding object encapsulates the interface for quick access to the SDK. It has simple functions that allow users to quickly get started and use the SDK.
Config
Provides configuration for enabling data streams, alignment modes, and frame aggregation modes, It is used to control the behavior of the data output.
StreamProfile
Stream configuration that defines parameters such as resolution, frame rate, and encoding format, It also provides management of camera parameters.
Frame
Represents a frame of data in the Stream, and also contains relevant information about that frame of data, such as timestamp, type, etc.
Filter
It mainly refers to some algorithmic processing modules for the composite stream FrameSet, such as point cloud algorithm processing.
Record
Recording functionality that captures data streams and saves them as files for later analysis or playback.
Playback
Playback functionality that plays recorded files and supports control over playback speed and other related parameters.
1.2.4. SDK Programming Model
Standard Flowchart:
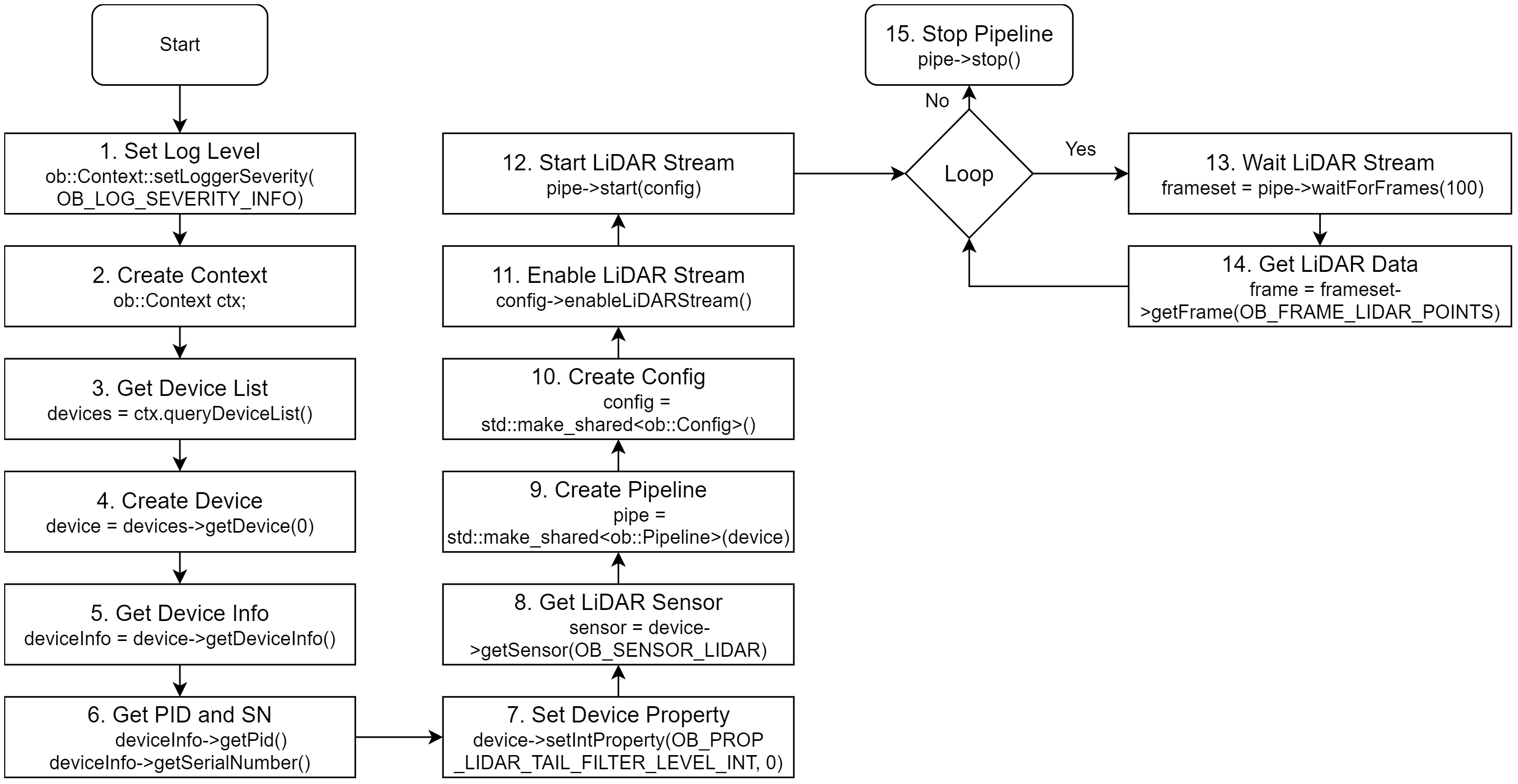
The standard flowchart demonstrates how to create a device from the device list, set and get parameters, start stream and get LiDAR data.
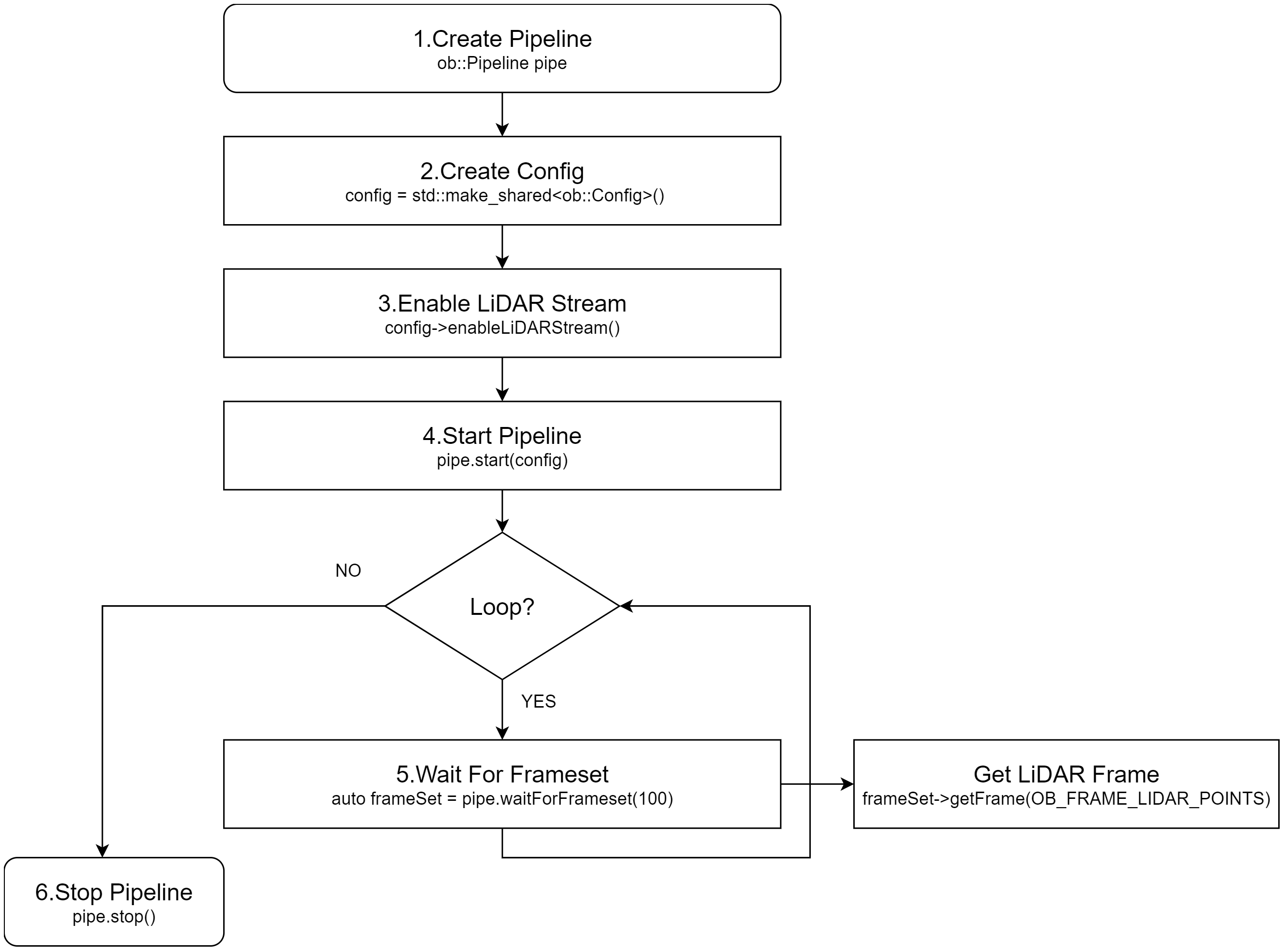
Flowchart using default configuration (stream acquisition based on the default settings in
OrbbecSDKConfig.xml):