OrbbecSDK_v2
C++ Sample: 1.stream.depth
Overview
Use the SDK interface to obtain the depth stream of the camera and display it in the window
Knowledge
DepthFrame can obtain relevant information about the depth
code overview
-
Configure the output color stream and open the video stream.You must configure this before calling pipe.start().
// By creating config to configure which streams to enable or disable for the pipeline, here the depth stream will be enabled. std::shared_ptr<ob::Config> config = std::make_shared<ob::Config>(); //This is the default depth streamprofile that is enabled. If you want to modify it, you can do so in the configuration file. config->enableVideoStream(OB_STREAM_DEPTH); -
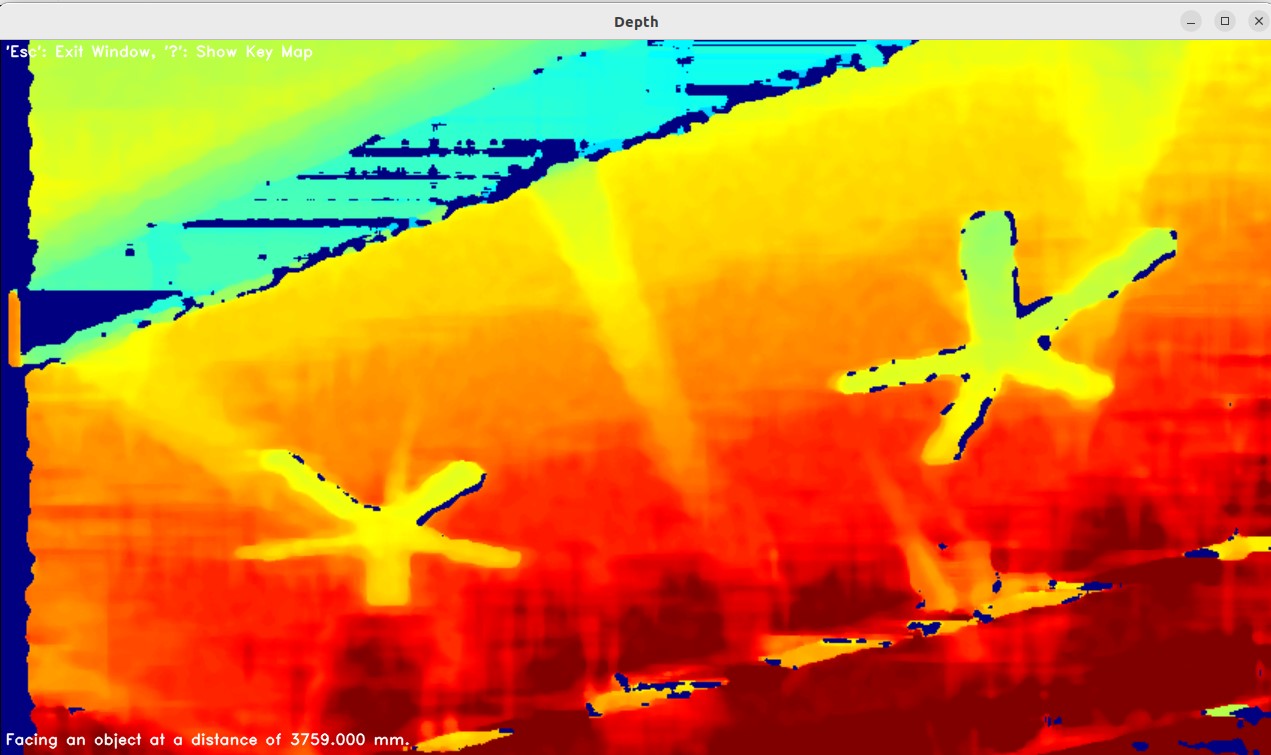
Calculate the distance from the center pixel to the opposite side from the acquired Y16 depth stream format and display it in the window. The distance is refreshed every 30 frames.The default depth unit for the SDK is millimeters.
// Get the depth Frame form depthFrameRaw. auto depthFrame = depthFrameRaw->as<ob::DepthFrame>(); // for Y16 format depth frame, print the distance of the center pixel every 30 frames. if(depthFrame->getIndex() % 30 == 0 && depthFrame->getFormat() == OB_FORMAT_Y16) { uint32_t width = depthFrame->getWidth(); uint32_t height = depthFrame->getHeight(); float scale = depthFrame->getValueScale(); const uint16_t *data = reinterpret_cast<const uint16_t *>(depthFrame->getData()); // pixel value multiplied by scale is the actual distance value in millimeters. float centerDistance = data[width * height / 2 + width / 2] * scale; // // attention: if the distance is 0, it means that the depth camera cannot detect the object (may be out of detection range). win.addLog("Facing an object at a distance of " + ob_smpl::toString(centerDistance, 3) + " mm. "); }
Run Sample
Moving the camera can obtain the change in the distance across the center pixel Press the Esc key in the window to exit the program.
Result