OrbbecSDK
C++ Sample Config Depth Work Mode
Supported devices: Gemini 2 series, Gemini 330 series cameras, Astra 2 cameras
Function description: Demonstrate the operation of converting depth working mode
This example is based on the C++High Level API for demonstration
1. Create a pipeline to get device
// Create a pipeline with default device
ob::Pipeline pipe;
// Get the device inside the pipeline
auto device = pipe.getDevice();
2. Check if work mode conversion is supported
// Check whether the camera depth working mode is supported, currently only the Gemini2 series binocular camera supports the depth working mode
if(!device->isPropertySupported(OB_STRUCT_CURRENT_DEPTH_ALG_MODE, OB_PERMISSION_READ_WRITE)) {
pressKeyExit("Current device not support depth work mode!");
return -1;
}
3. Get a list of depth work modes
// Query the current camera depth mode
auto curDepthMode = device->getCurrentDepthWorkMode();
// Get the list of camera depth modes
auto depthModeList = device->getDepthWorkModeList();
std::cout << "depthModeList size: " << depthModeList->count() << std::endl;
for(uint32_t i = 0; i < depthModeList->count(); i++) {
std::cout << "depthModeList[" << i << "]: " << (*depthModeList)[i];
if(strcmp(curDepthMode.name, (*depthModeList)[i].name) == 0) {
std::cout << " (Current WorkMode)";
}
std::cout << std::endl;
}
4. Set depth working mode
// Let the user choose a mode, then switch
if(depthModeList->count() > 0) {
uint32_t index = 0;
std::cout << "Please input the index from above depthModeList, newIndex = ";
std::cin >> index;
if(index >= 0 && index < depthModeList->count()) { // legitimacy check
device->switchDepthWorkMode((*depthModeList)[index].name);
// Check whether the mode changes after the display is switched
curDepthMode = device->getCurrentDepthWorkMode();
if(strcmp(curDepthMode.name, (*depthModeList)[index].name) == 0) {
std::cout << "Switch depth work mode success! currentDepthMode: " << curDepthMode << std::endl;
}
else {
std::cout << "Switch depth work mode failed!" << std::endl;
}
}
else {
std::cout << "switchDepthMode faild. invalid index: " << index << std::endl;
}
}
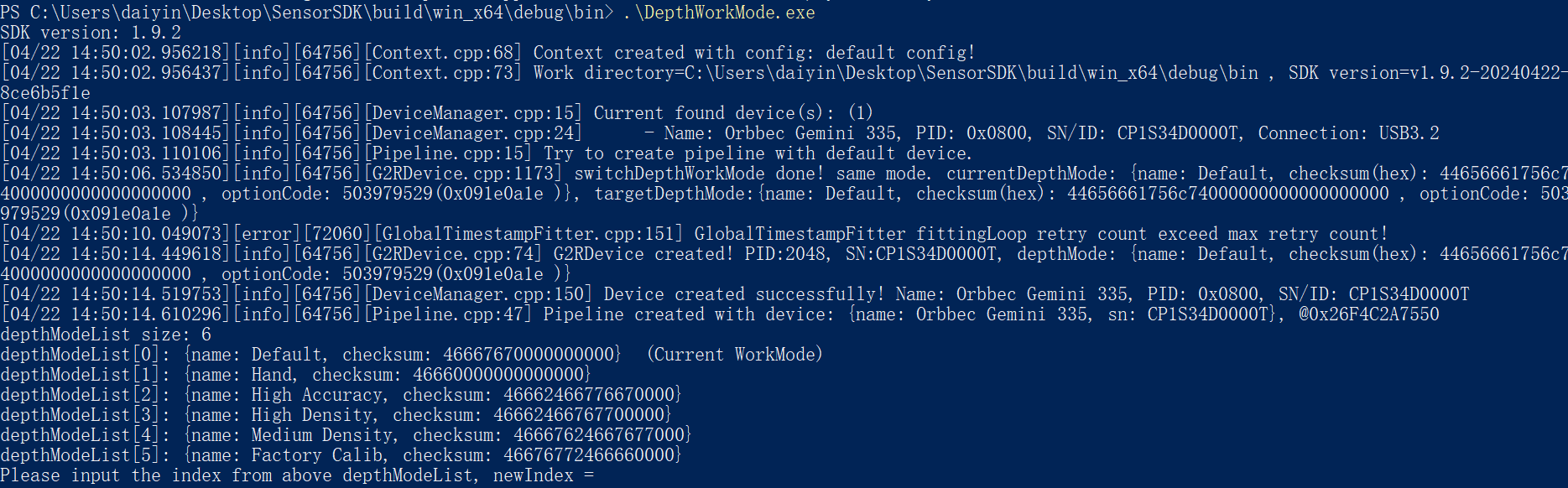
5. expected Output